Thanks for your great work first.
And I have some questions about the camera pose data.
-
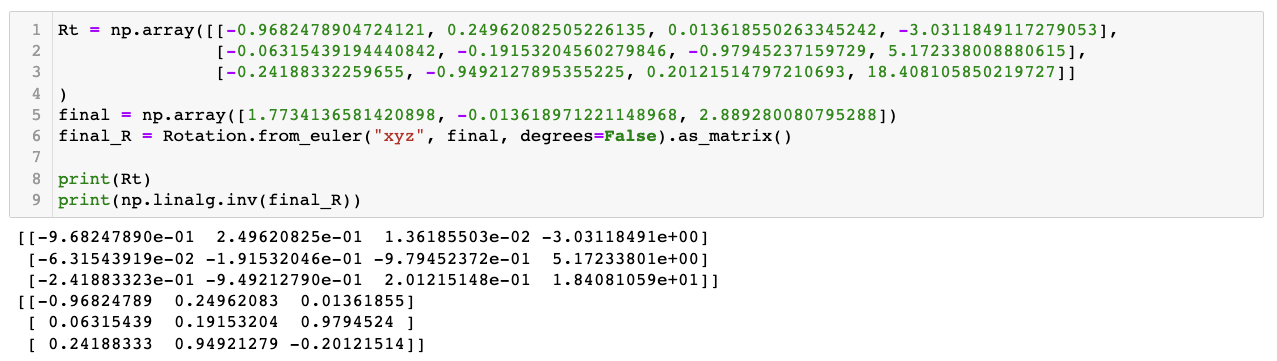
As I understand, "final_camera_rotation" and "camera_rt_matrix" should have inverse relation.
But when I made inverse matrix of "final_camera_rotation", the signs of the second and third rows are opposite. Did I miss something?
-
I can get "final_camera_rotation" by applying "rotation_from_original_to_point" to the "camera_original_rotation". But I don't understand the meaning of "camera_original_rotation". I thought that it would be a camera rotation of the first frame but it isn't. What is it and why do we need it?
Thanks for your great work first.
And I have some questions about the camera pose data.
As I understand, "final_camera_rotation" and "camera_rt_matrix" should have inverse relation.

But when I made inverse matrix of "final_camera_rotation", the signs of the second and third rows are opposite. Did I miss something?
I can get "final_camera_rotation" by applying "rotation_from_original_to_point" to the "camera_original_rotation". But I don't understand the meaning of "camera_original_rotation". I thought that it would be a camera rotation of the first frame but it isn't. What is it and why do we need it?