When alliance is RED, all works well
But when alliance is BLUE, turnrobotrelative doesnt ever finish.
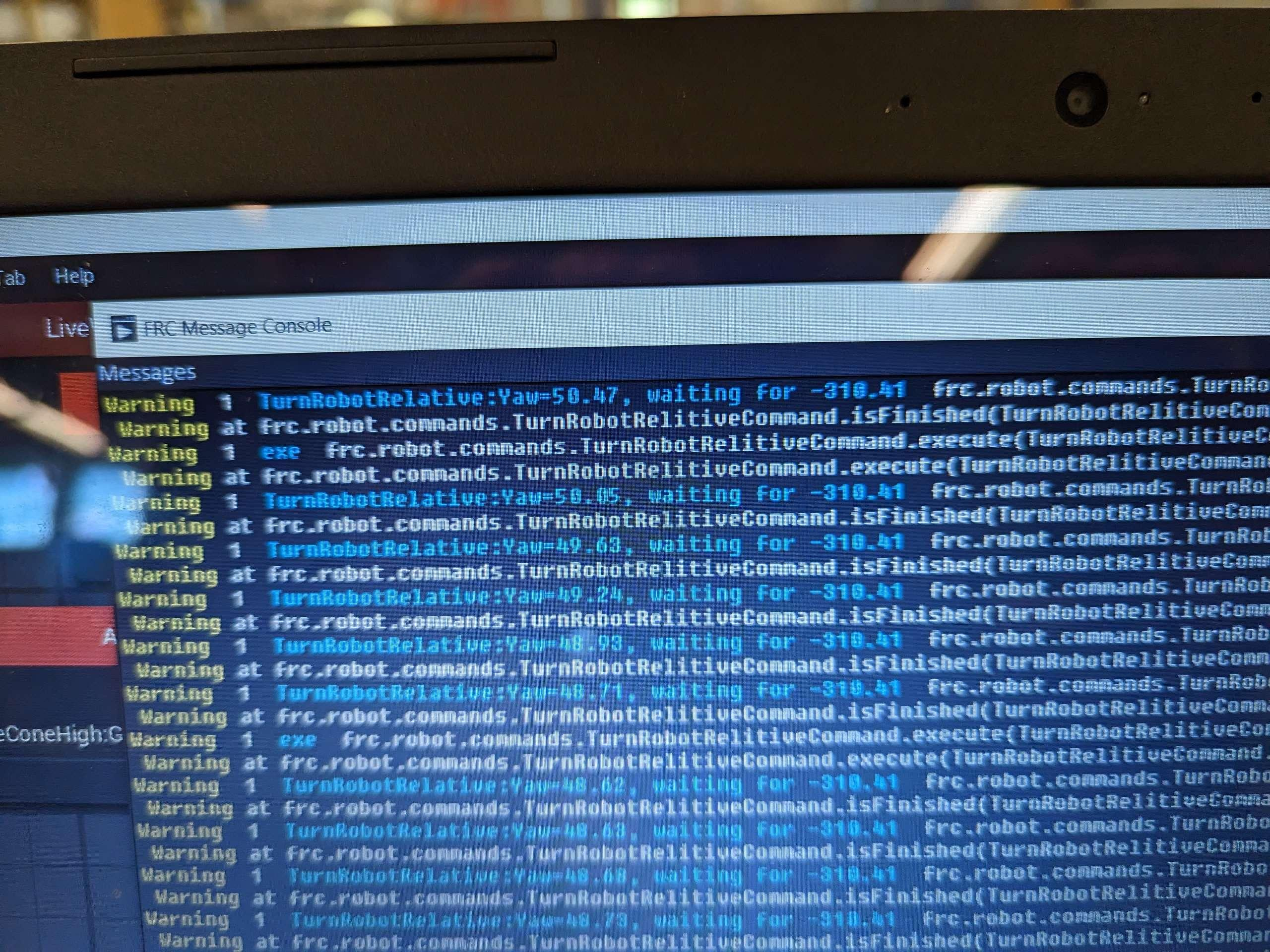
The issue appears to be a bug in which the requested angle has not been wrapped around, as shown in the image below, produced by this code:
String msg = String.format("TurnRobotRelative:Yaw=%.2f, waiting for %.2f", yawSupplier.getYawAngleDegrees(),angleToWait);
DriverStation.reportWarning(msg , false);
When alliance is RED, all works well
But when alliance is BLUE, turnrobotrelative doesnt ever finish.
The issue appears to be a bug in which the requested angle has not been wrapped around, as shown in the image below, produced by this code: