释放你对天空的想象,用开源技术解锁更加真实的飞行体验
-
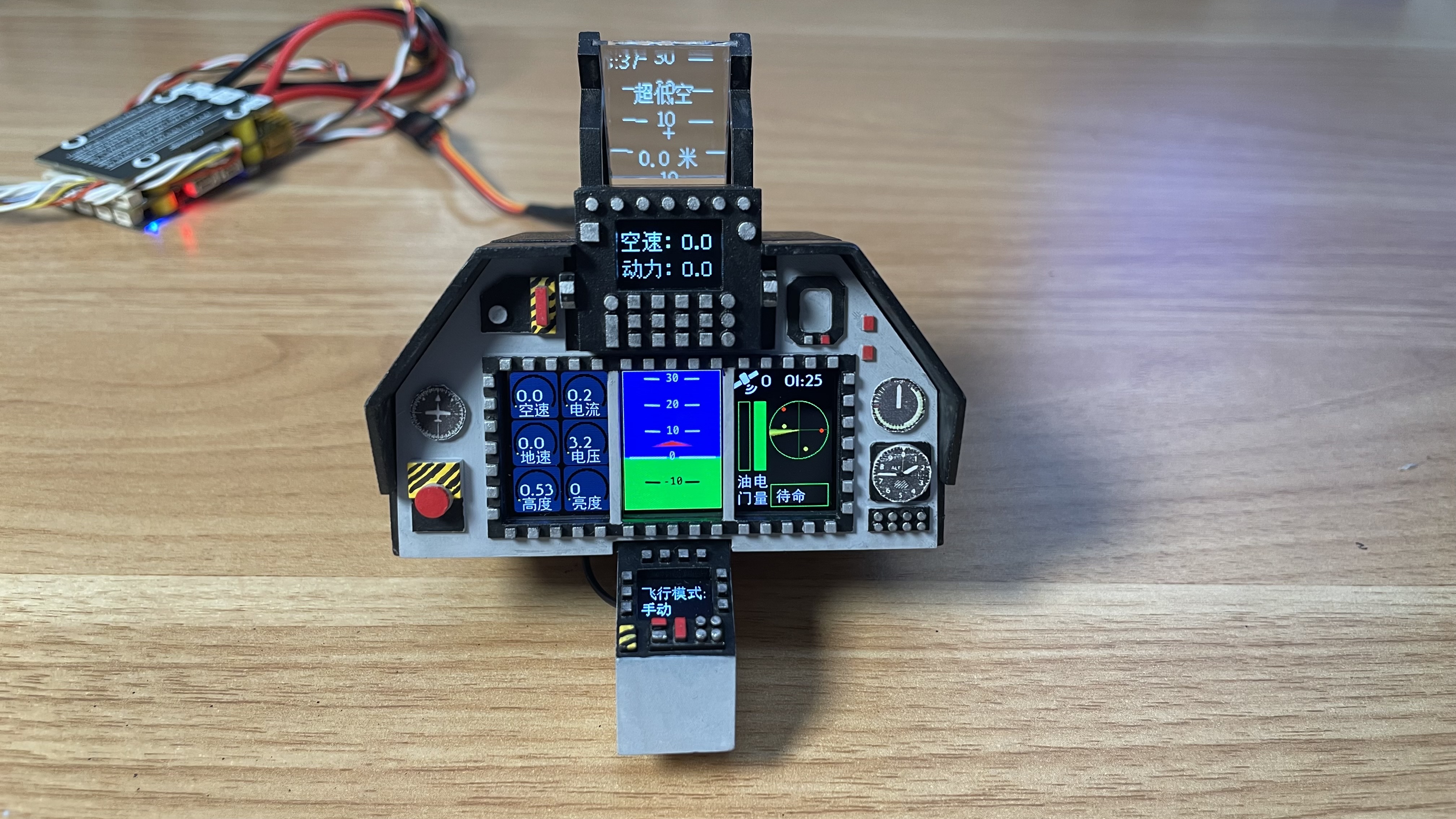
这是一套低成本、高拟真度的FPV仿真座舱系统。
-
将抽象的飞行数据转化为直观的视觉交互——无论是操控无人机穿越峡谷,还是模拟民航机巡航云端,这套系统都能让你以飞行员的视角,重新定义与天空的对话。
-
通过将工业级飞行数据交互技术(Mavlink)与沉浸式视觉渲染结合,我们让消费级无人机也能还原真实飞机的驾驶舱交互——从仪表反馈到HUD动态投影,每一处细节都让用户无限接近真实飞行体验。
-
这不是一个成品,而是一套飞行交互的“乐高”:用开源代码、ESP32开发板、OLED显示器和3D模型,打造沉浸式FPV飞行体验。

1. 核心技术
- 真机数据同步:基于Mavlink协议毫秒级解析20+项飞行参数(姿态角、空速、G力等),支持Pixhawk/Ardupilot/INAV等主流飞控;
- 超低延迟架构:ESP32定制固件,支持双核运行,实现姿态仪画面45+FPS流畅渲染,超低端到端延迟,数据响应媲美民航训练设备。
2. 视觉仿真
- OLED智能面板:
- 动态飞行姿态仪+可定制仪表布局,用户可自由配置数据字段(如增删节流阀显示、卫星状态、火控雷达告警模拟、编队友机位置雷达等等);
- 环境亮度适应,可根据用户需求调节亮度,烈日下依然清晰可见,低光照条件不过曝。
- 控制面板仪表图层开源可编程,开发者可导入自定义告警逻辑(如失速预警红色闪烁)。
- HUD全息投影:
- 战机风格平视显示系统,支持姿态仪投影,以及投射关键飞行参数(超低空告警、攻角、爬升率)等,动态聚焦关键数据;
- 飞行数高清晰度展示,缩短反应时间,提高飞行员的态势感知能力,增强复杂环境下飞行能力
- 真实比例复刻
- 基于激光LIDAR扫描与航空图纸逆向建模,尽可能还原真实座舱结构,飞行摇杆、踏板、节流阀、舱盖等都一一呈现。
- 支持用户导入自定义座舱模型,利用OLED智能面板和HUD全息投影模块,打造自己的FPV座舱
3. 开源生态
- 开源座舱3D模型库:
- 提供仿真座舱结构、航电面板、HUD支架等模块化模型(STEP格式),支持3D打印/CNC加工;
- 已发布、迭代多个版本中国歼20座舱模型、中国歼10座舱模型、美国F35座舱模型
- 社区已衍生出民航、滑翔机、战斗机风格等多种主题自定义模型。
- 创客友好:
- 所有代码/设计文件遵循MIT协议,支持二次开发(如用Raspberry Pi替换ESP32)。
项目详细说明文档请移步GitBook:https://mason-3.gitbook.io/uav-fpv-cockpit
QQ群:217107609