Swerve Overview
Swerve Drive is a holonomic drivetrain type in which all drive wheels are independently driven and steered. It allows the robot to move in any direction and independently translate its chassis orientation.
- Agility: It has the ability to move in any 2d vector. This means it can translate in ANY direction. While translating, it can also rotate freely.
- Traction: Has the ability to use high traction wheels without drawbacks.
- Stealth: The intent of a driver using swerve can't be known because of how fast it can switch directions.
- Flexibility: Different options and customizations are possible with Swerve.
- Servicability: Taking modules and replacing them can take < 5 minutes if practiced.
- Extreme complexity: Not an easy drivetrain to execute and use to it's full potential.
- Heavy: Introduces weight early on into development, which can limit the complexity of other subs.
- Resource intensive: Swerve uses eight motors and four absolute encoders, meaning that it is extremely resource intensive.
Swerve Statistics
- On our specific gear ratio and swerve setup, the chassis can move at about 3-4 m/s, without anything on top. This is guaranteed to go down as we increase the amount of subsystems on our robot.
- We use solely falcons on our Swerve drive for motors. The class used in code is the
TalonFXWclass.
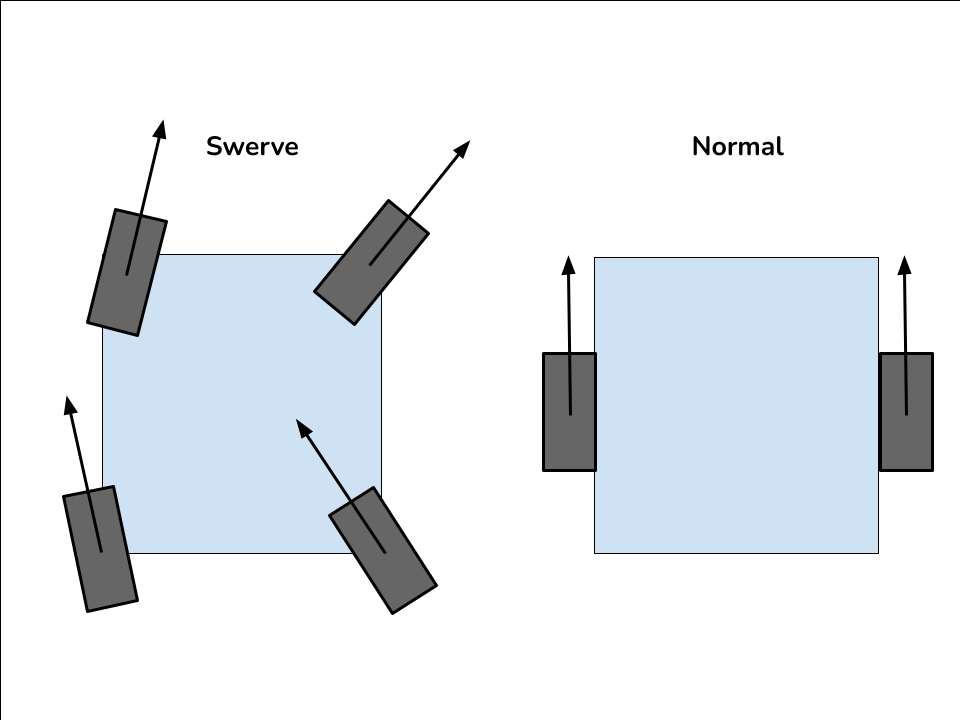
Swerve works with each wheel vector and magnitude contributing to the overall chassis vector and magnitude, like in the image shown below.