Some of the information on this page is very outdated! I had originally designed the project to work with MG90D sized servos and a PCA9685, which was later changed to using the recommended setup as listed in the BOM.
Due to the changes over time, the tutorials maybe a bit clunky in that respect as alot of the pictures used still include the old servos and PCA9685. Sorry about that.
All the files you need are available though. :)
I'm currently using the JX Servo edit files of this head which will use the following servos to replace MG90D/MG92B.
-
x12 - JX PDI-1109
-
x3 - JX PDI-1181
The PDI-1181 is a slightly larger servo so it will have more torque on all 3 jaw motors. The JX servos seem to be the quietest, no buzz and better performance servos out of the 7 different micro servos I bought and tested. They should really improve overall performance in general.
I have left the files to use the previous old setup available also for those wishing to use MG90D/MG90S type servos.
I likely will not be updating this page further or do not have plans to do so at this point. I am planning on working on a more advanced silicone cast type head at some point in the future which is where the focus will be directed.
On this page you will find all of the Syntek edition remixed head stl files, components needed, step by step put together tutorials and information relating to getting it running in myrobotlab (MRL). Future updates and files shall be available here as well. :)
As I am still early into the experimenting phase of this head also, I expect that there will be a number of updates to improve this page, files and write ups in the weeks to come. Stay tuned!
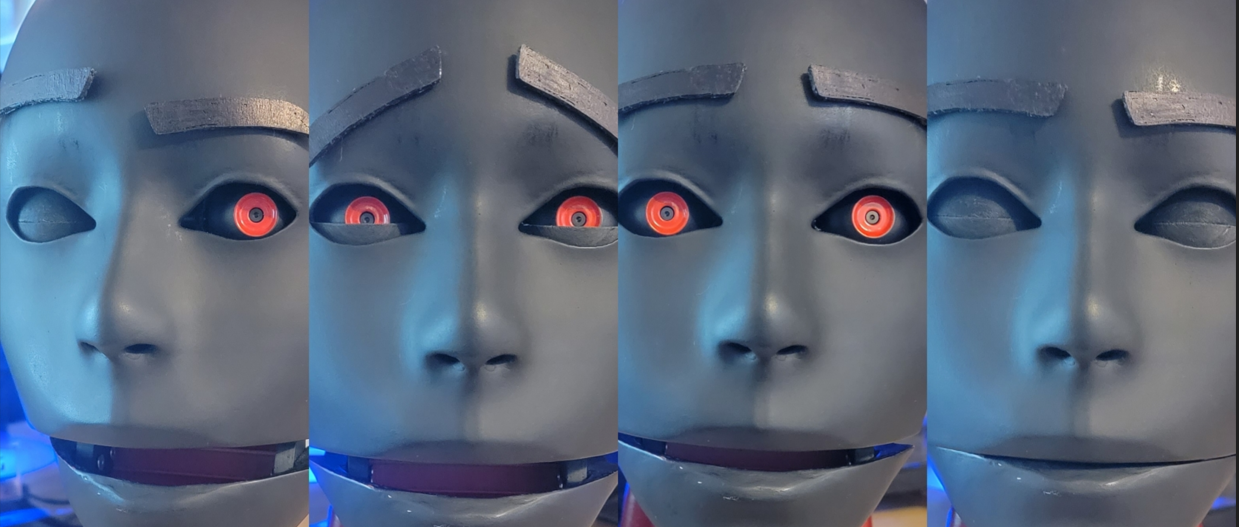
An introduction to Syntek (My InMoov Robot)
WhatIsSyntek.mp4
If you were unfamiliar with InMoov robot and or are now more curious about it, you should head over to the InMoov website and find out more about the project by clicking the image below as THIS project page is directly related to the InMoov project.
It is a mostly magnetically held remixed edition of Gael Langevin (InMoov Founder)'s InMoov robot head that has been fit with independent eyes, eyelids, eyebrows and an additional axis in the jaw. This head is controlled via a PCA9685 micro controller, an Arduino Nano and MYROBOTLAB and can be built to function independently or as part of your InMoov robot.
No problem! Here is my "Beginners guide to moving servos with a PCA9685 and MYROBOTLAB" video to help you get started.
And while we are at it, here is a bonus link to the MYROBOTLAB (MRL) homepage: http://myrobotlab.org/
For a full detailed list of the electronics, hardware and everything needed, please refer to BOM readme file.
https://github.com/CyberSyntek/Syntek-Edition-Head-Remix/tree/main/BOM
The tutorials begin here!
https://github.com/CyberSyntek/Syntek-Edition-Head-Remix/tree/main/01-MainPlate