很多年前买了野火的开发板,一直吃灰(有其他重要的事情)
最近抽出一点时间,打算系统的学习一下这个开发板,主要是我个人想要开发一个小器件。
文档是出于记录的目的,防止忘记。
本文参考:
视频参考的是B站keysking和野火官方2个up主, 文档就比较多了,不在详细记录。
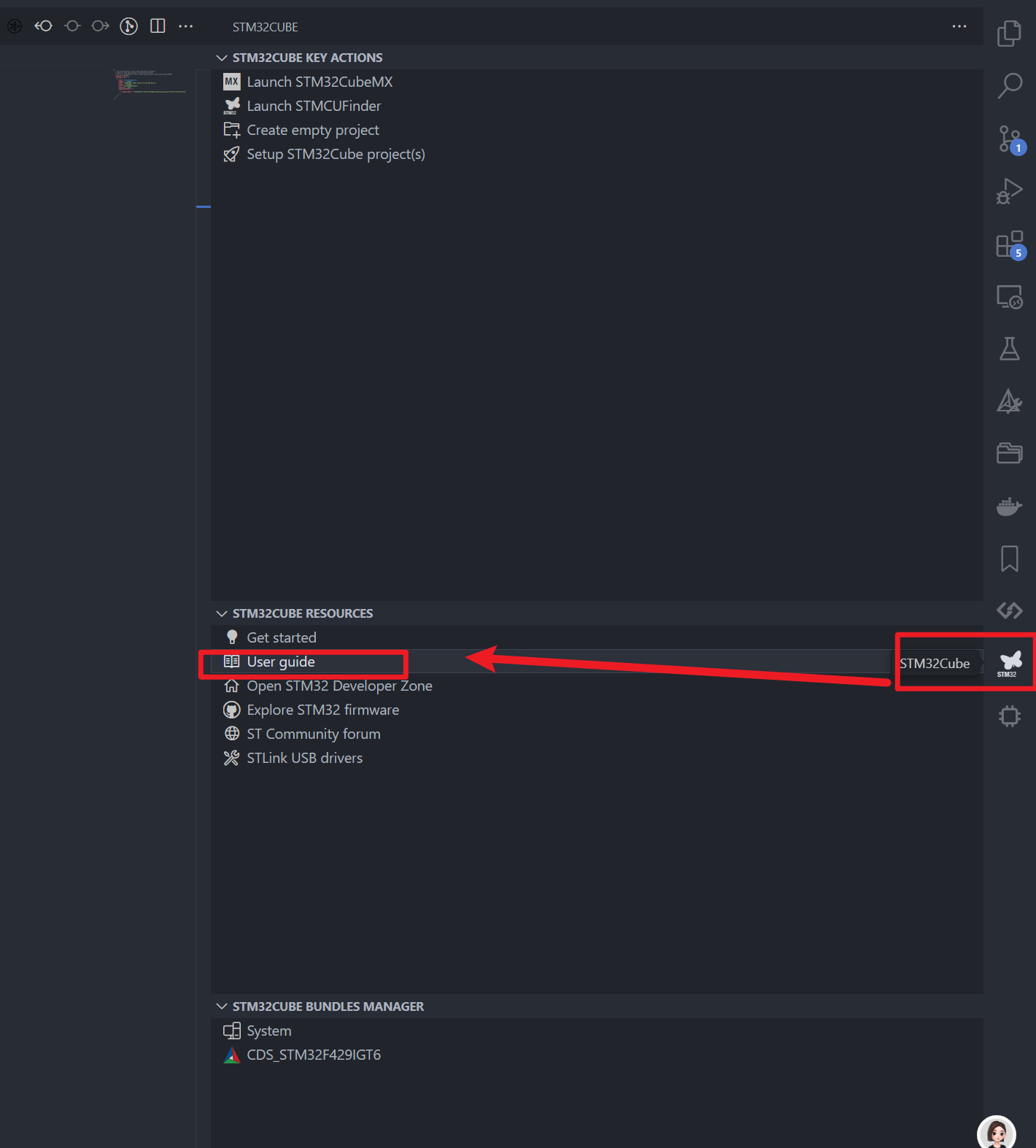
首先参考ST官网的教程,下载vscode插件。web链接

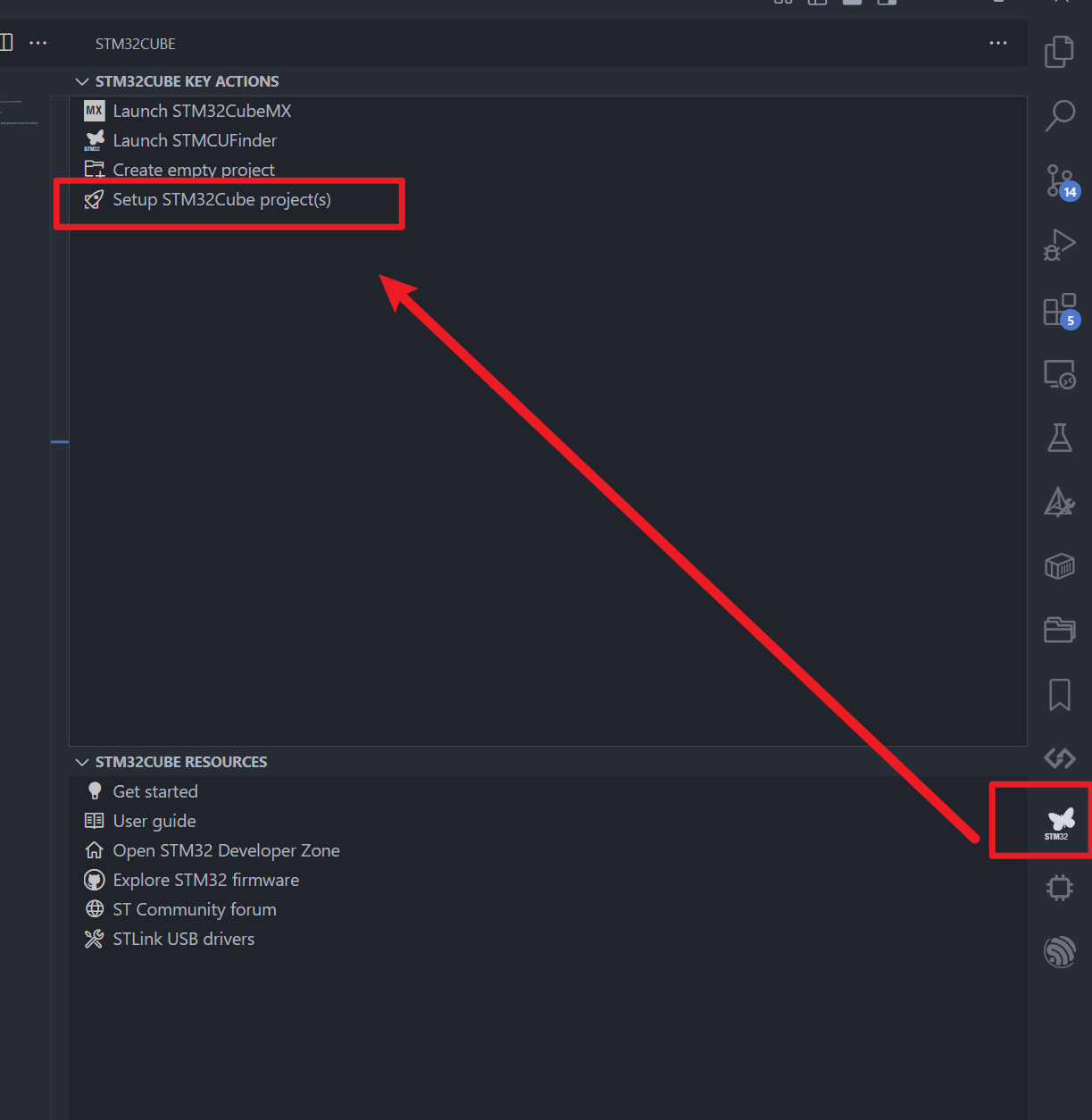
下载之后在vscode侧边栏可以看到stm32插件的菜单。, 点击user guide 则可以看该插件配置教程。
-
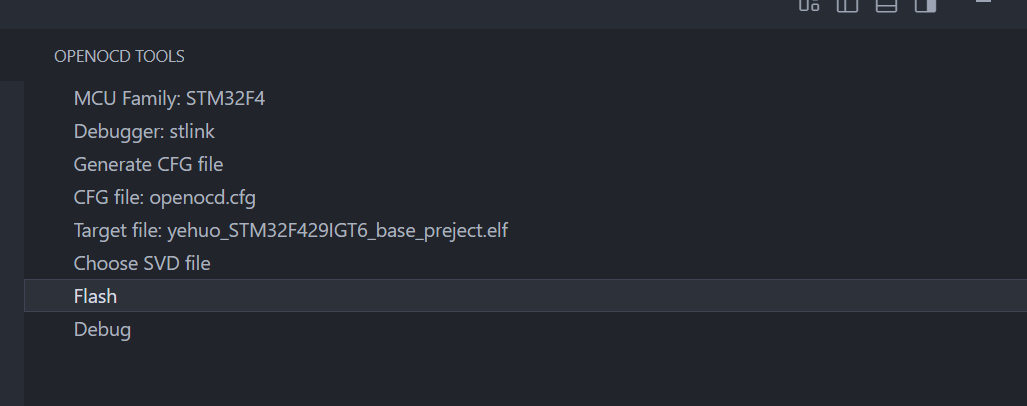
下载openocd
- 下载vscode插件
- 侧边栏自动配置
- 下载vscode插件
-
debug

配置 lanuch.json
{
// Use IntelliSense to learn about possible attributes.
// Hover to view descriptions of existing attributes.
// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"type": "stlinkgdbtarget",
"request": "launch",
"name": "STM32Cube: STM32 Launch ST-Link GDB Server",
"origin": "snippet",
"cwd": "${workspaceFolder}",
"runEntry": "main",
"imagesAndSymbols": [
{
"imageFileName": "${command:st-stm32-ide-debug-launch.get-projects-binary-from-context1}"
}
]
}
]
}然后按下F5进行debug, 如果有问题,则可以点击STM32的vscode插件,配置下环境:
- 安装
pip install pyocd
# 列出设备
pyocd list
# 擦除芯片
pyocd erase -t stm32f429xg --chip
# 下载程序
pyocd flash -t stm32f429xg D:\github\CDS_STM32F429IGT6\cmake-build-debug\yehuo_STM32F429IGT6_base_preject.elf
# 复位芯片
pyocd reset -t stm32f429xg
# 组合操作(擦除、下载、复位)
pyocd flash -t stm32f429xg --erase chip D:\github\CDS_STM32F429IGT6\cmake-build-debug\yehuo_STM32F429IGT6_base_preject.elf -R
- vscode插件:Serial monitor
- pyqt写的开源工具: comtool
- 开源可视化工具: Serial Studio
cds的野火STM32F429IGT6学习代码仓库
基础信息
- 开发板是:野火STM32F429IGT6 V1
我还有一块STM32F7的开发板,CUBEMX截至2025年5月24日是不支持这种有2核的MCU的。 所以暂时先用F429进行开发吧。
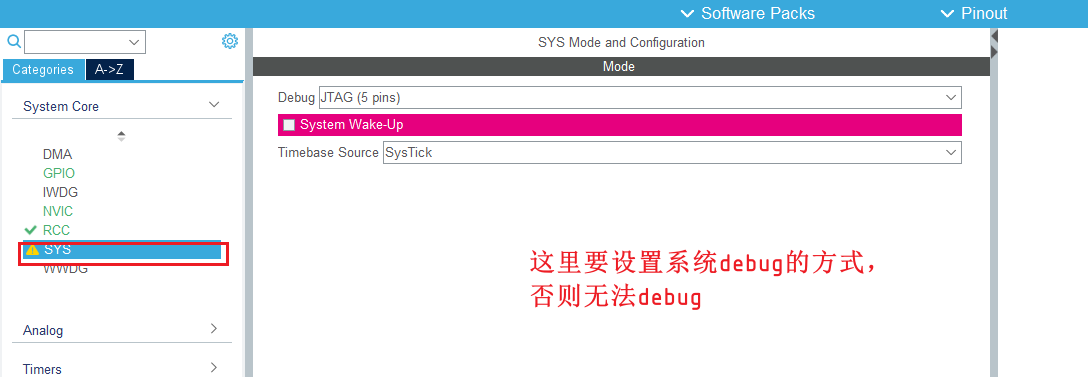
有2个重要的设置需要注意:

- 安装,这个全网都是教程,跳过。
- 新建项目,无脑下一步,没有什么难度。
Ctrl + R快捷键可以快速导出项目的配置。给别人分享超级方便。

- 老样子,开机直接来一个点灯大师。
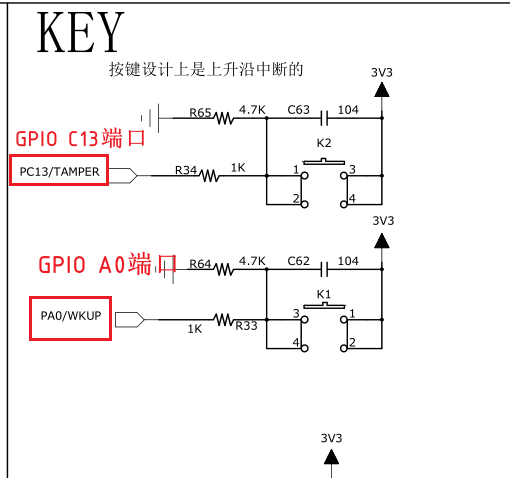
先看一下野火开发板的原理图:
- key
- LED
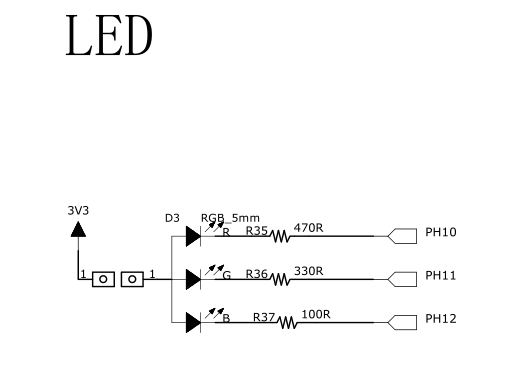
- cubeMx的GPIO配置如下图:
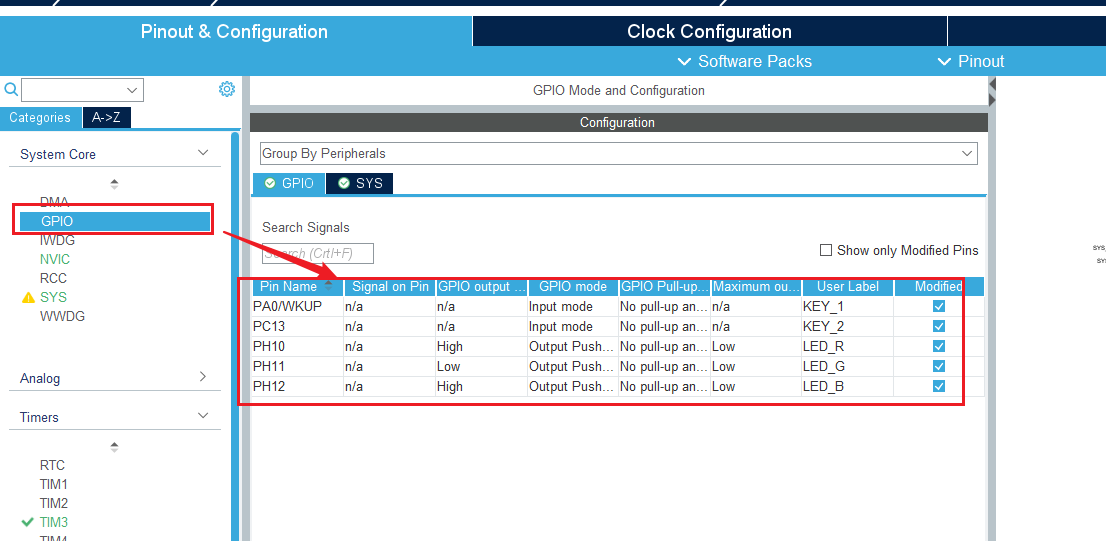
- 生成项目编译进去
在main.c的死循环里面,写入下面一个简单的程序,来通过key2 翻转led灯。
void key2_toggle_green_led_pin()
{
if (HAL_GPIO_ReadPin(KEY_2_GPIO_Port, KEY_2_Pin)) {
while (HAL_GPIO_ReadPin(KEY_2_GPIO_Port, KEY_2_Pin)) {
// do nothings
}
HAL_GPIO_TogglePin(LED_G_GPIO_Port, LED_G_Pin);
}
}keil编译下载进去,效果还可以。
RCC :reset clock control 复位和时钟控制器。
- 作用
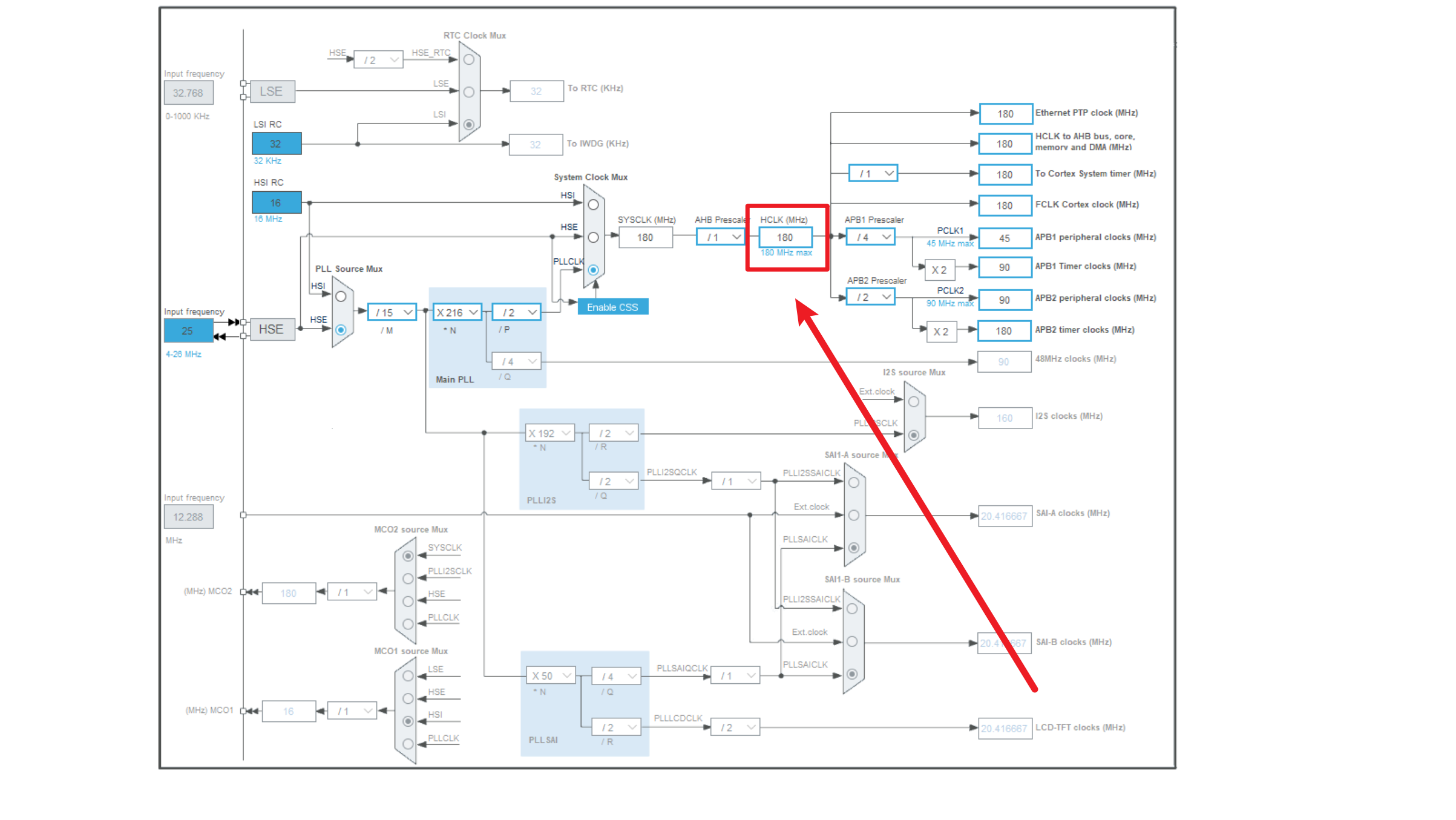
设置系统时钟 SYSCLK、设置 AHB 分频因子(决定 HCLK 等于多少)、设置 APB2 分频因子(决定 PCLK2 等于多少)、设置 APB1 分频因子(决定 PCLK1 等于多少)、设置各个外设的分频因子;控制 AHB、APB2 和 APB1 这三条总线时钟的开启、控制每个外设的时钟的开启。对于 SYSCLK、HCLK、PCLK2、PCLK1 这四个时钟的配置一般是:HCLK =SYSCLK=PLLCLK = 180M,PCLK1=HCLK/2 = 90M,PCLK1=HCLK/4 = 45M。这个时钟配置也是库函数的标准配置,我们用的最多的就是这个。
- 一般设置(F429举例)
HCLK = SYSCLK=PLLCLK= 180M,PCLK1=HCLK/2 = 90M,PCLK1=HCLK/4 = 45M
- 时钟树
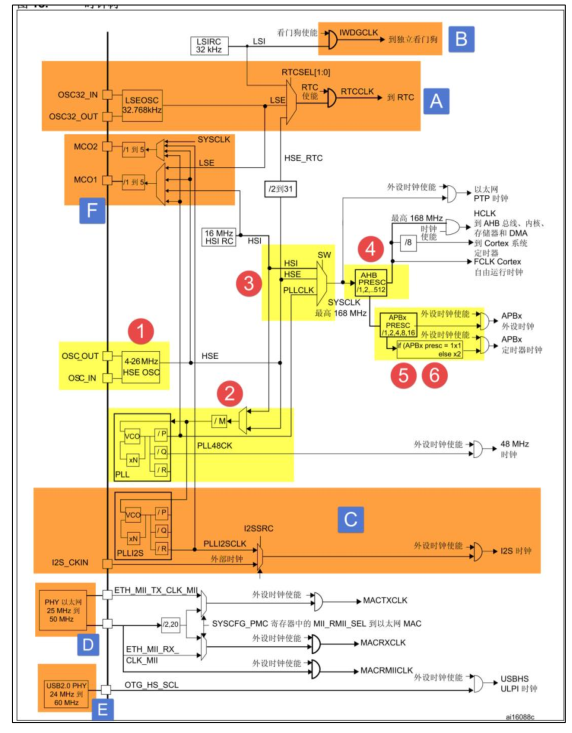
时钟的分类:
- HSE高速外部时钟信号
- 锁相环 PLL
- 系统时钟 SYSCLK
- AHB总线时钟 HCLK
- APB1总线时钟 HCLK1
- APB2总线时钟 HCLK2
这里分类的顺序分别对应上图时钟树的标号。
1. HSE
- 主要特性
- 外部时钟,不是系统自身的时钟源。
- 如果使用HSE作为系统时钟的话,或者使用HSE被锁相环失踪PLL倍频后的时钟作为系统时钟源的话,当HSE出现故障,系统会自动切换到HSI时钟,直到HSE恢复。
2. PLL 锁相环时钟、
- 主要特性 1. 倍频时钟 2. 有主锁相环PLL、 专用的 PLLI2S二个,都有HSE或者HSI提供时钟源。 3. 主PLL锁相环时钟 1. 总共有2路输出 1. 第一路:系统时钟 2. 第二路:用于 USB OTG FS 的时钟(48M)、RNG 和 SDIO 时钟(<=48M)专用的 PLLI2S 用于生成精确时钟,给 I2S 提供时钟
- 跟时钟相关的都在这个hal文件里面。
Drivers\STM32F4xx_HAL_Driver\Inc\stm32f4xx_hal_rcc.h
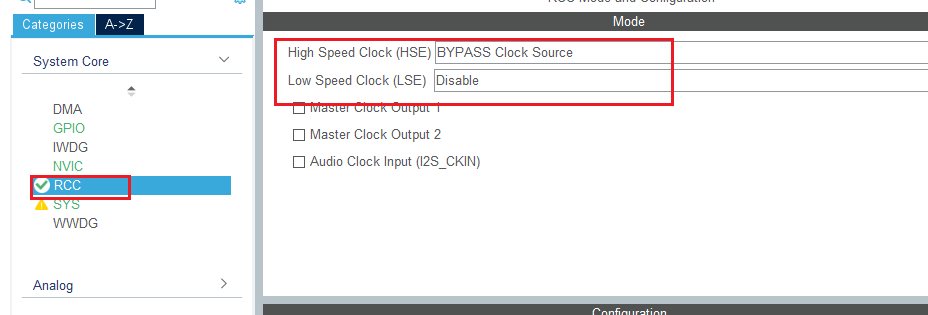
- cubemx IDE配置相关
要选中外部HSE时钟,就必须先配置RCC,开启HSE。
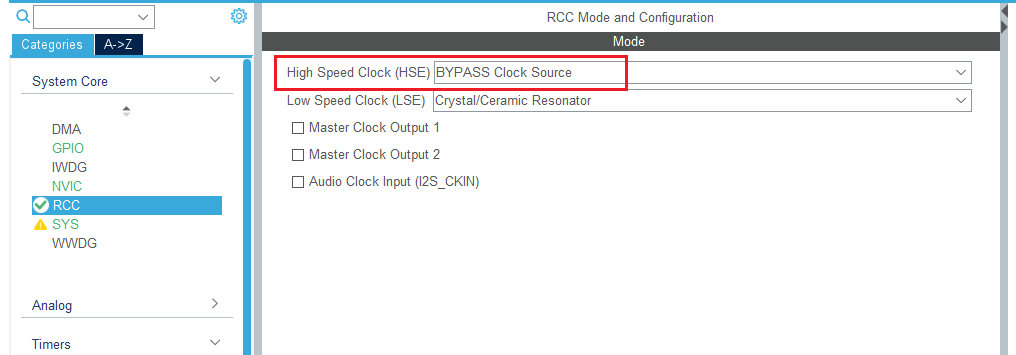
主要是配置这二个结构体分别配置:
- 系统时钟源头。
- RCC System, AHB and APB busses clock configuration
/**
* @brief RCC Internal/External Oscillator (HSE, HSI, LSE and LSI) configuration structure definition
* 配置系统振荡器的属性
*/
typedef struct
{ */
}RCC_OscInitTypeDef;
/**
* @brief RCC System, AHB and APB busses clock configuration structure definition
* RCC系统,AHB和APB总线时钟配置结构定义
*/
typedef struct
{
}RCC_ClkInitTypeDef; __HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();这里会有最大值,直接设置最大值后,CUBEMX会自动设置其它参数的。
1、使用 HAL_NVIC_SetPriorityGrouping(uint32_t PriorityGroup) 函数配置中断优先级分组。一般默认是 NVIC_PRIORITYGROUP_4 分组 4。
2、使用 HAL_NVIC_SetPriority(IRQn_Type IRQn, uint32_t PreemptPriority, uint32_tSubPriority)函数配置具体外设中断通道的抢占优先级和子优先级。
3、使用 HAL_NVIC_EnableIRQ 函数使能中断请求
cubemx实战:
首先要配置系统时钟
- 将引脚设置为复用输出
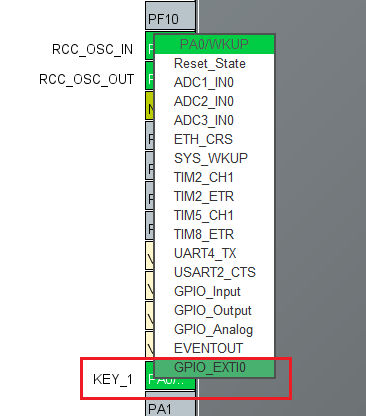
- 选择上升沿触发
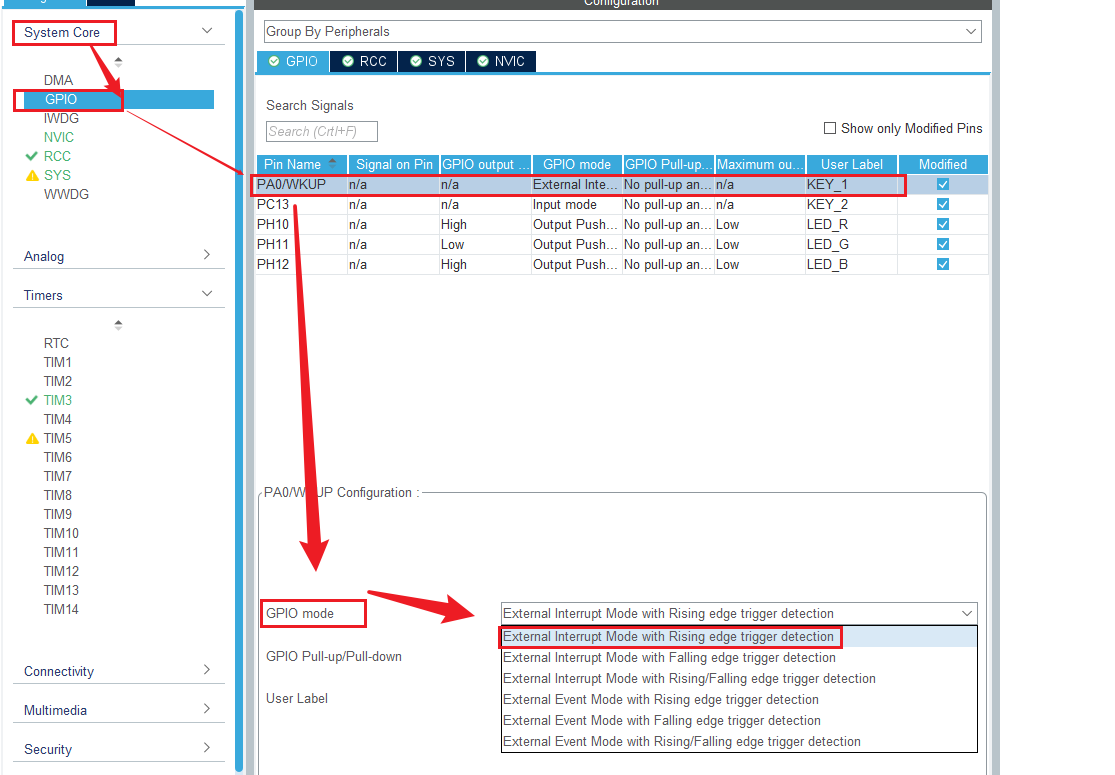
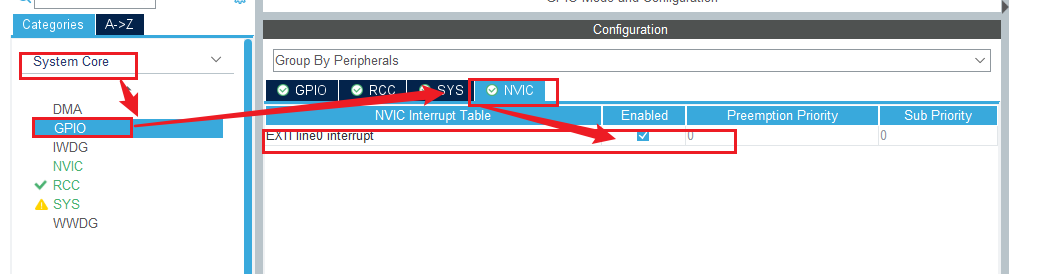
- 使能中断
- 生成代码,使用keil编译复写中断服务函数
在上面我们可以看到设置的是

中断线0的中断,我们可以在中断向量表中查询该中断的响应函数为:EXTI0_IRQHandler
MDK-ARM\startup_stm32f429xx.s 中断向量表查询路径
__Vectors DCD __initial_sp ; Top of Stack
DCD EXTI0_IRQHandler ; EXTI Line0然后可以在中断服务函数里找到该函数
Core\Src\stm32f4xx_it.c
/**
* @brief This function handles EXTI line0 interrupt.
*/
void EXTI0_IRQHandler(void)
{
/* USER CODE BEGIN EXTI0_IRQn 0 */
/* USER CODE END EXTI0_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);
/* USER CODE BEGIN EXTI0_IRQn 1 */
/* USER CODE END EXTI0_IRQn 1 */
}可以看到这个函数将中断事件进行了分发,分发给了函数HAL_GPIO_EXTI_IRQHandler 我们点开这个函数再看一眼:
Drivers\STM32F4xx_HAL_Driver\Src\stm32f4xx_hal_gpio.c
void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin)
{
/* EXTI line interrupt detected */
if(__HAL_GPIO_EXTI_GET_IT(GPIO_Pin) != RESET)
{
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_Pin);
HAL_GPIO_EXTI_Callback(GPIO_Pin);
}
}我们看到这里再次对中断进行了一次判断,然后分发给了函数HAL_GPIO_EXTI_Callback这个函数就是统一的中断处理函数了。我们对中断的代码逻辑加在这一部分就可以了。我在这里对红色的led灯进行了翻转。
Drivers\STM32F4xx_HAL_Driver\Src\stm32f4xx_hal_gpio.c
__weak void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
key1_toggle_red_led_pin();
/* Prevent unused argument(s) compilation warning */
UNUSED(GPIO_Pin);
/* NOTE: This function Should not be modified, when the callback is needed,
the HAL_GPIO_EXTI_Callback could be implemented in the user file
*/
}烧录进入开发板一切正常。
第二次重新生成工程的适合发现,我写的代码没有了??????
我们仔细看这个函数的注释:这个函数不应该被修改,当这个回调需要的适合用户可以自己实现在自己的文件中。
/* NOTE: This function Should not be modified, when the callback is needed,
the HAL_GPIO_EXTI_Callback could be implemented in the user file
*/然后仔细一看这个函数是个 弱函数, 所以下来我们要自己实现。
- 首先新建一个文件:
Core\Src\cds_gpio_exit.c包含头文件\#include "stm32f4xx_hal.h" - 复写函数:
void HAL_GPIO_EXTI_Callback(uint16_t *GPIO_Pin*) - 添加到keil编译环境中
- 烧录下载验证,一切ok。

我们来梳理一下流程:
- 配置系统时钟
- 配置debug方式
- 引脚设置为复用输出
- 选择沿触方式
- 生成代码,使用keil编译复写中断服务函数。
- GPIO的中断服务响应函数定义在
stm32f4xx_hal_gpio.c文件中,然后该文件将这个中断信号通过函数调用的方式分发给了stm32f4xx_hal_gpio.c文件 - 我们实际的GPIO中断逻辑就都可以写在该文件路径下。但是会代码耦合。
- 重新定义回调函数,并实现。
- GPIO的中断服务响应函数定义在
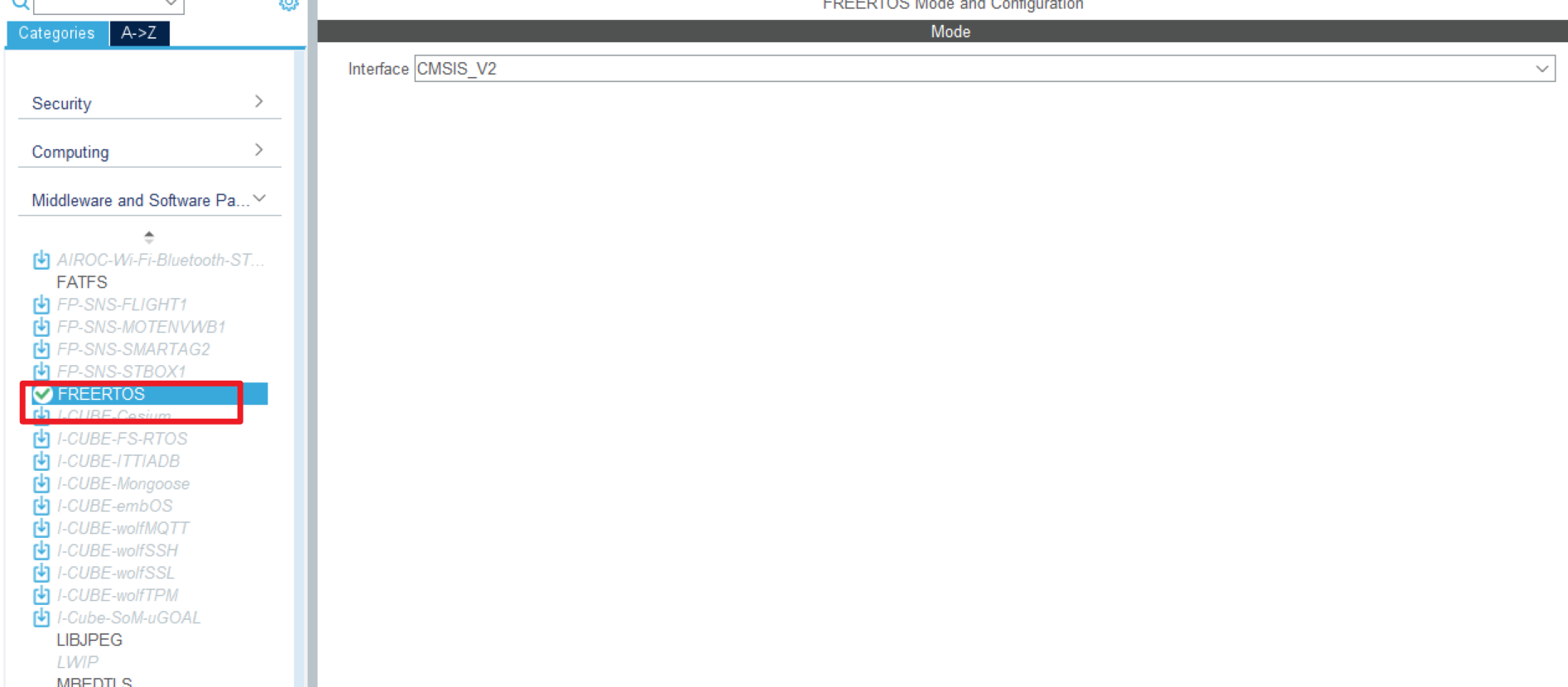
这部分没什么说的,只需要勾选了操作系统即可:
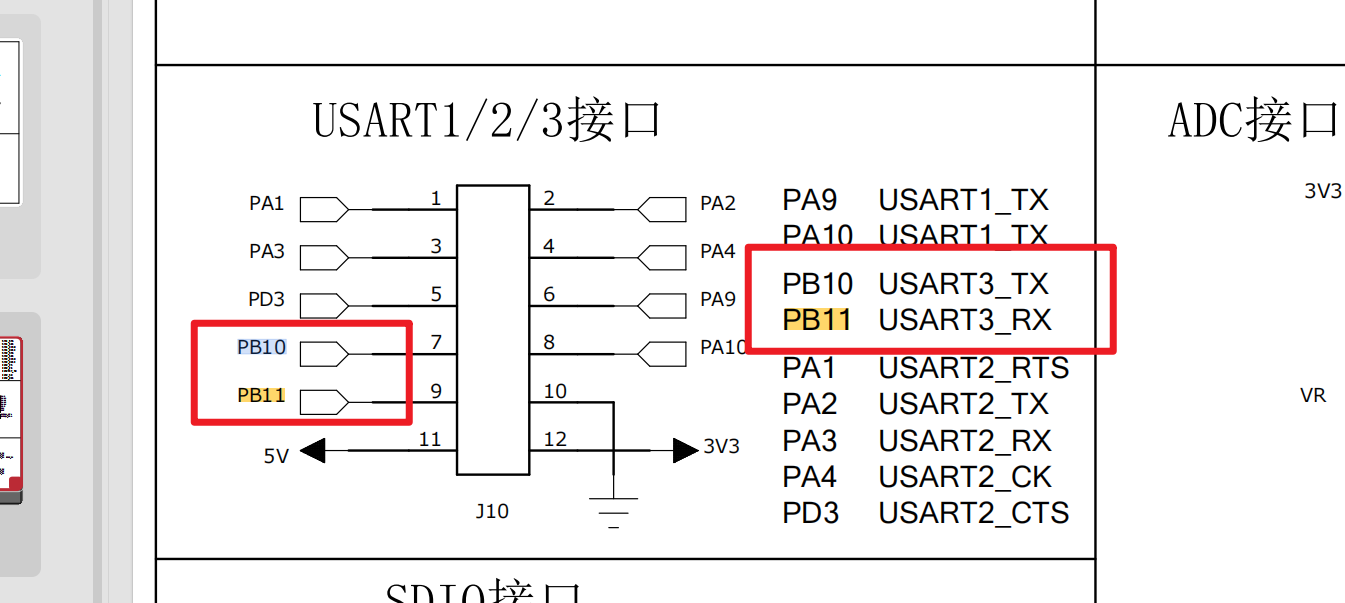
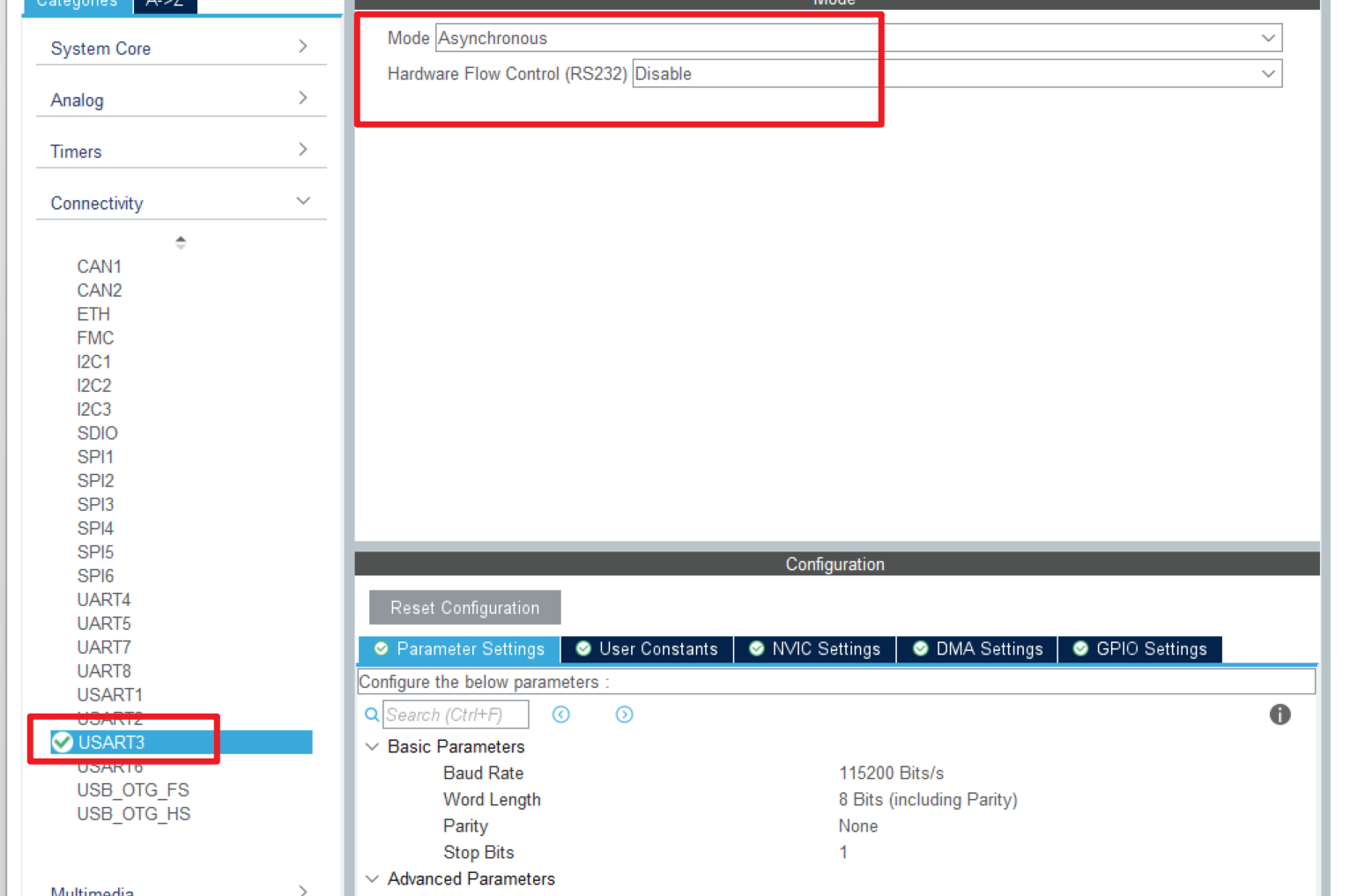
在这里我们使用开发板上的 USART3 作为例子
有一个vscode的串口收发插件特别好用:

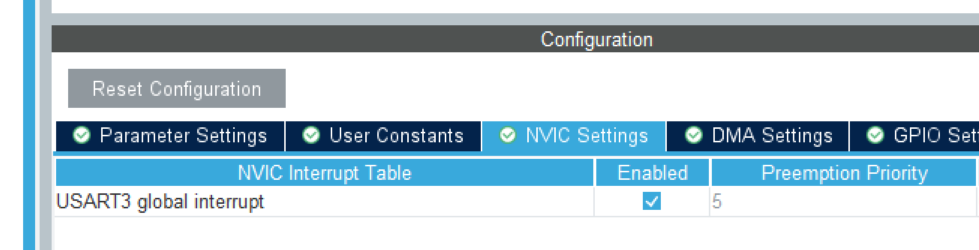
在 startup_stm32f429xx.s 文件中找到ta的中断处理函数

在代码中可以看到:
void USART3_IRQHandler(void)
{
/* USER CODE BEGIN USART3_IRQn 0 */
/* USER CODE END USART3_IRQn 0 */
HAL_UART_IRQHandler(&huart1);
/* USER CODE BEGIN USART3_IRQn 1 */
/* USER CODE END USART3_IRQn 1 */
}这里稍微有点没搞明白, 会在中断函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);再次调用,这个函数是一个weak函数, 可以重新定义为:
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {
if (huart->Instance == USART3) {
HAL_UART_Transmit_IT(&huart1, uart3_rx_buffer, 2); // Echo back received data
// Check the received command and toggle the corresponding LED
if(uart3_rx_buffer[0] == 'R') {
HAL_GPIO_TogglePin(LED_R_GPIO_Port, LED_R_Pin); // Toggle red LED
} else if(uart3_rx_buffer[0] == 'G') {
HAL_GPIO_TogglePin(LED_G_GPIO_Port, LED_G_Pin); // Toggle green LED
} else if(uart3_rx_buffer[0] == 'B') {
HAL_GPIO_TogglePin(LED_B_GPIO_Port, LED_B_Pin); // Toggle blue LED
} else {
uint8_t response[] = "Invalid Command";
HAL_UART_Transmit_IT(huart, response, sizeof(response));
}
HAL_UART_Receive_IT(huart, uart3_rx_buffer, 2); // Re-enable the interrupt for next reception
}
}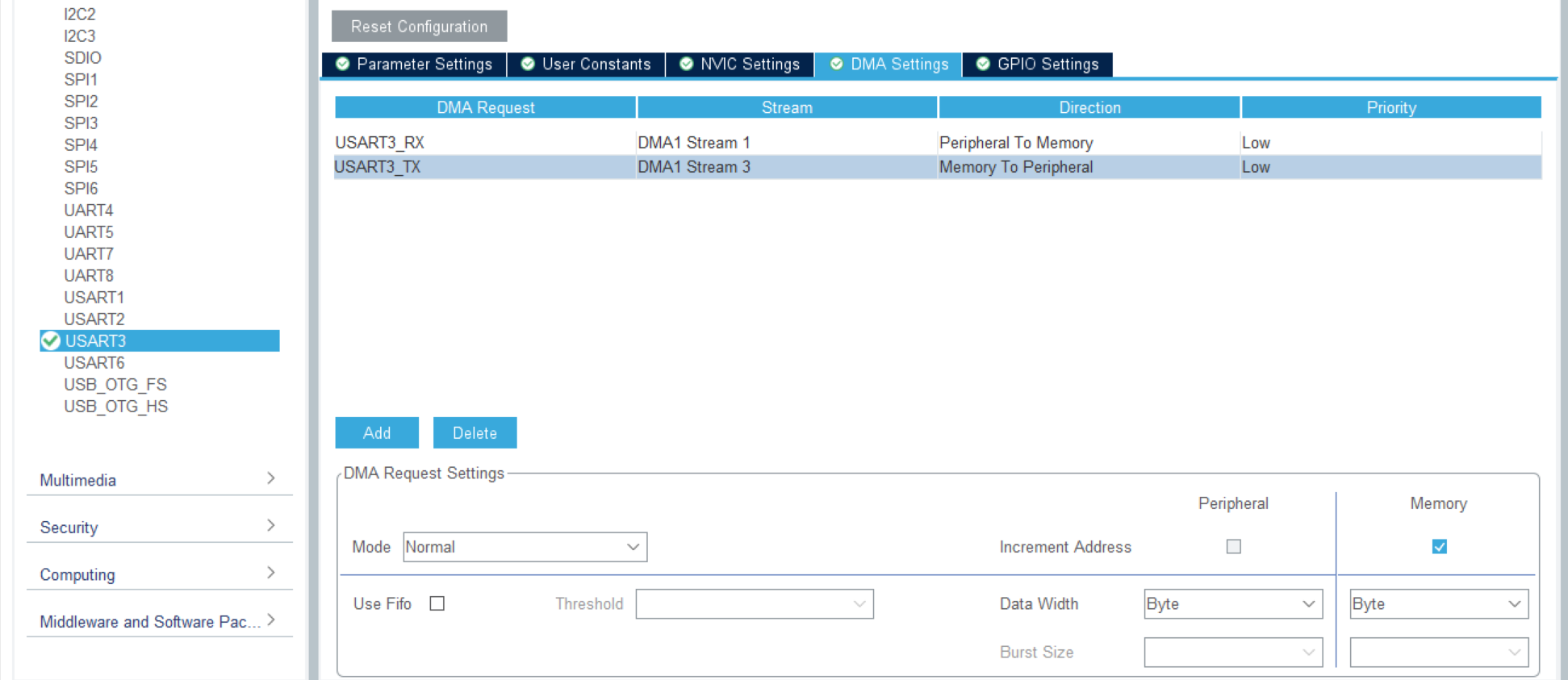
使用DMA只需要将
// 中断接受数据
HAL_UART_Transmit_IT()
// DMA接受数据
HAL_UART_Transmit_DMA()在开启DMA情况下, 串口的中断就不会在被触发了, 因为 当 UART 配置为 DMA 模式时,数据直接从 UART 缓冲区传输到内存,**RXNE 标志不会被置位**(因为 DMA 自动清除了它),导致 RXNE 中断无法触发。, 我们什么时候知道串口接受或者发送完成了呢?
答案就是当系统的idle中断时候, 则说明uart发送或者接受完了, 所以我们在idle的中断函数里处理uart发送完成和接受完成的情况。
这里有一个坑就是 DMA 传输过半中断也会激活系统的idle中断, 所以需要关闭DMA传输过半中断
// 关闭DMA传输过半中断(HAL库默认开启,但我们只需要接收完成中断)
__HAL_DMA_DISABLE_IT(huart1.hdmarx, DMA_IT_HT);- 添加对浮点数据的支持
# Add compile options
# Note: The -u _printf_float option is used to enable floating-point support in printf/scanf functions.
target_link_options(${CMAKE_PROJECT_NAME} PRIVATE
-u _printf_float
)我看的up主是使用I2C协议控制OLED屏幕,我没有OLED屏幕......
只有一块RGB屏幕,是要走比较复杂的协议LTDC, 我先学习下I2C协议吧。
FLSAH 存储器又称闪存,它与 EEPROM 都是掉电后数据不丢失的存储器,但 FLASH存储器容量普遍大于 EEPROM,现在基本取代了它的地位。我们生活中常用的 U 盘、SD卡、SSD 固态硬盘以及我们 STM32 芯片内部用于存储程序的设备,都是 FLASH 类型的存储器。在存储控制上,最主要的区别是 FLASH 芯片只能一大片一大片地擦写,而在“I2C章节”中我们了解到 EEPROM 可以单个字节擦写。
温度传感器为: DS18B20
每一个芯片都有自己独立的ID,本模块需连接的引脚仅三根,除去基础的 VCC 电源线以及 GND 地线以外,只剩下 DATA 数据线,
将数据线连接至任意 GPIO,保证该 IO 口收发数据正常即可完成对 DHT11 模块的控制。
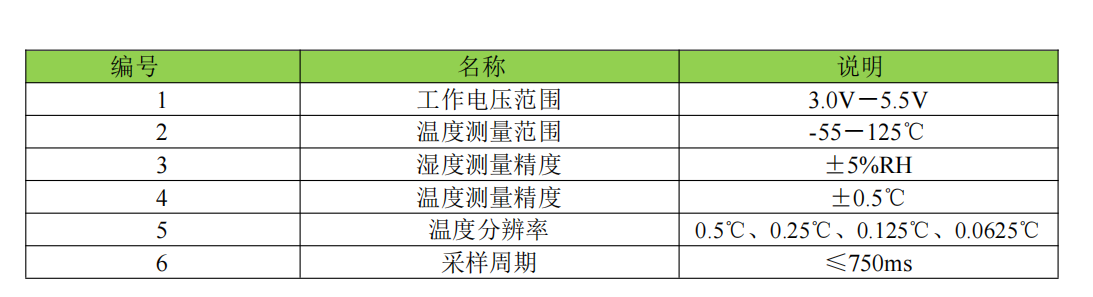
所以驱动温度外设就特别简单,2个引脚是正负极。另外一个引脚是GPIO,设置为输入输出模式,用于读取温度和芯片ID即可。

看图可知:
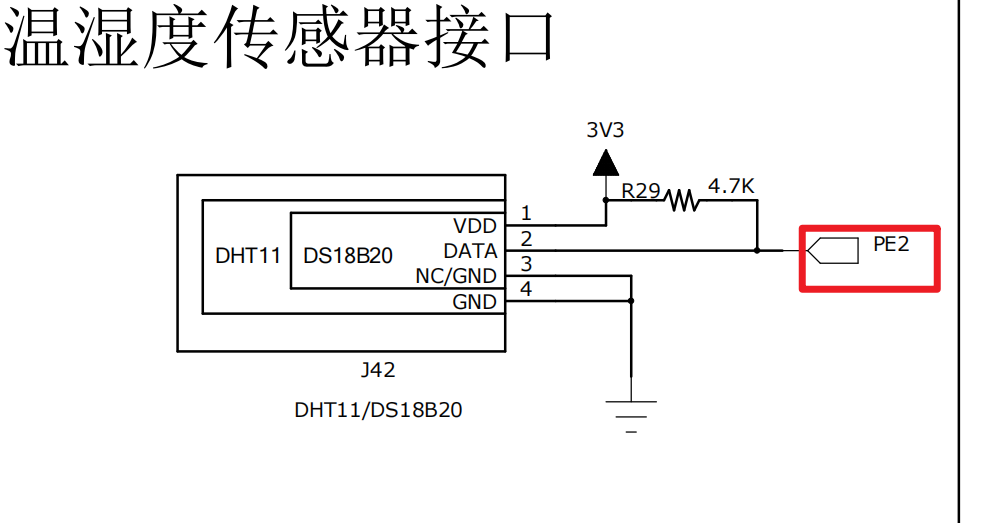
PE2口就是我们要读取的口,根据该口配置相关IO即可。
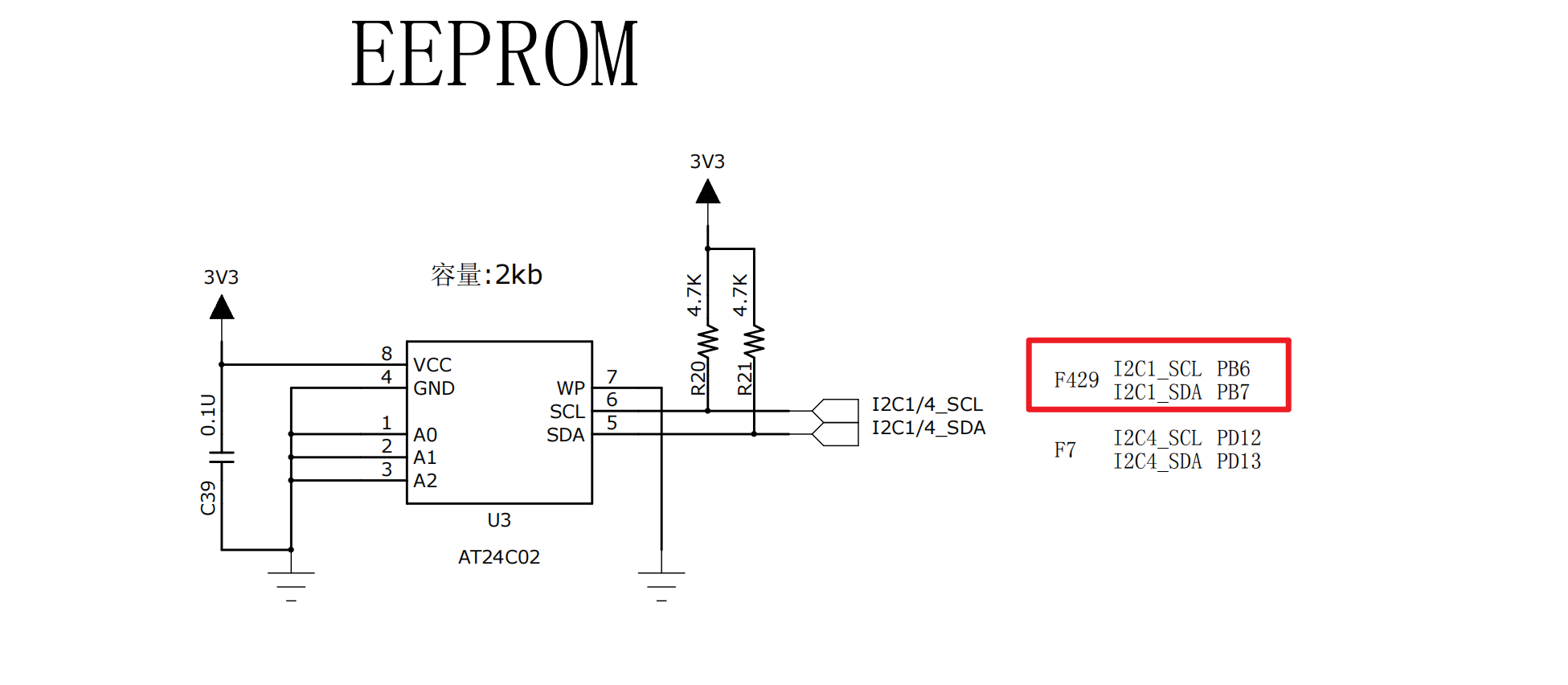
型号是: AT24C02。 芯片手册在立创商城搜索这个型号就可以下载。
是I2C1的接口, 通过这个接口就可以读写。
EEPROM是是可以存储数据的,断电数据不会消失。
DWT 是 ARM Cortex-M 内核中提供的一个调试和性能分析模块,具有以下用途:
- 周期计数(高精度延时)
- 指令统计
- 性能监控(如睡眠次数、中断次数等